CUDA Lab: Sum of Squares & Matrix Multiplication
CUDA(Compute Unified Device Architecture)是显卡厂商 NVIDIA 推出的运算平台,是一种通用的并行计算架构,该架构使 GPU 能够解决复杂的计算问题。我们可以使用 GPU 来并行例如神经网络、图像处理等在 CPU 上运行起来比较耗时的程序,通过 GPU 并行计算可以大大提高算法的运行速度。
本实验包含两部分。
- 第一部分(Sum of Squares):计算数组元素的平方和,并通过不断的优化来提高程序的性能,以此来学习和理解 CUDA 编程需要注意之处。
- 第二部分(Matrix Multiplication):利用 CUDA 实现矩阵乘法并行化。
CUDA安装
- Visual Studio 2015 Community Download,CUDA Tookit 与 Visual Studio 2017 Community 暂不兼容。
- CUDA Tookit Download。
下载 CUDA Tookit 时选择相应的操作系统及版本等平台参数。例如,在 Win10 下进行实验,参数选择如下。
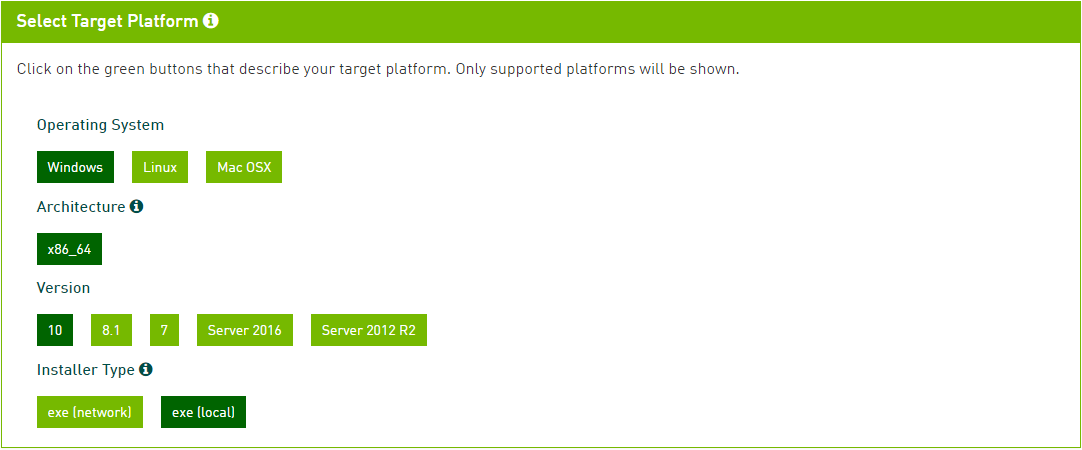
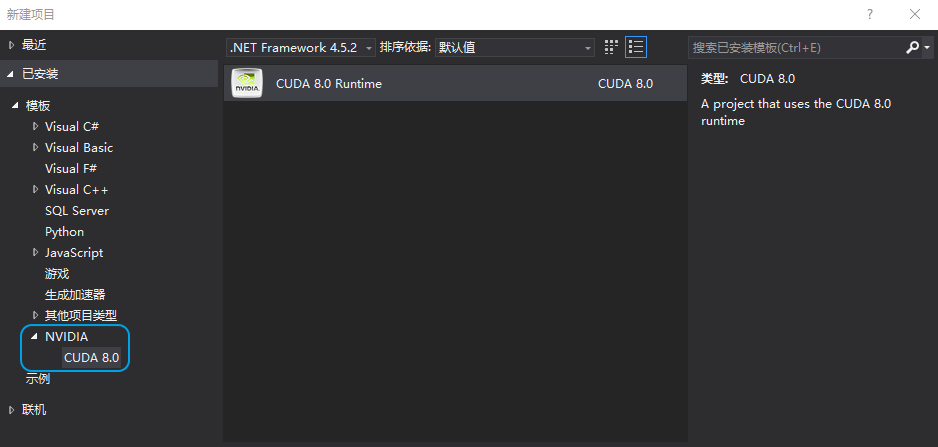
注意:应先安装 Visual Studio 再安装 CUDA Tookit,因为在安装 CUDA Tookit 时会自动配置 CUDA for Visual Studio,CUDA Tookit 安装成功后可以在 Visual Studio 中创建 CUDA Project。
CPU & GPU
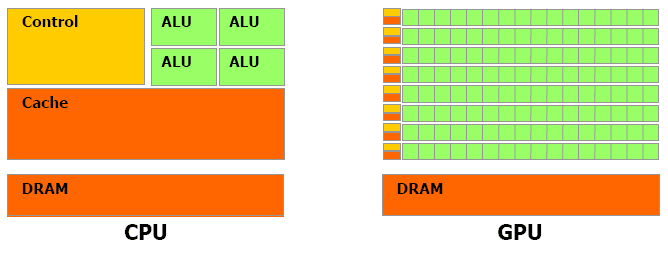
下图为 CPU 和 GPU 的对比图,相比于 CPU,GPU 更加适用于计算强度高,多并行的计算中。GPU 拥有更多的晶体管,而不是数据 Cache 和控制器,这样设计的意图是在并行计算过程中,每个数据单元经常执行相同的程序,不需要繁琐的复杂流程控制和 Cache,而更需要强大的计算能力。
使用 GPU 来进行运算工作,和使用 CPU 相比,主要有以下优势。
- GPU 通常具有更大的内存带宽。例如,NVIDIA 的 GeForce 8800GTX 具有超过 50GB/s 的内存带宽,而目前高阶 CPU 的内存带宽则在 10GB/s 左右。
- GPU 具有更大量的执行单元。例如 GeForce 8800GTX 具有 128 个 “stream processors”,频率为 1.35GHz。CPU 频率通常较高,但是执行单元的数目则要少得多。
- 和高阶 CPU 相比,GPU 的价格较为低廉。例如目前一张 GeForce 8800GT 包括 512MB 内存的价格,和一颗 2.4GHz 四核心 CPU 的价格相当。
CUDA架构
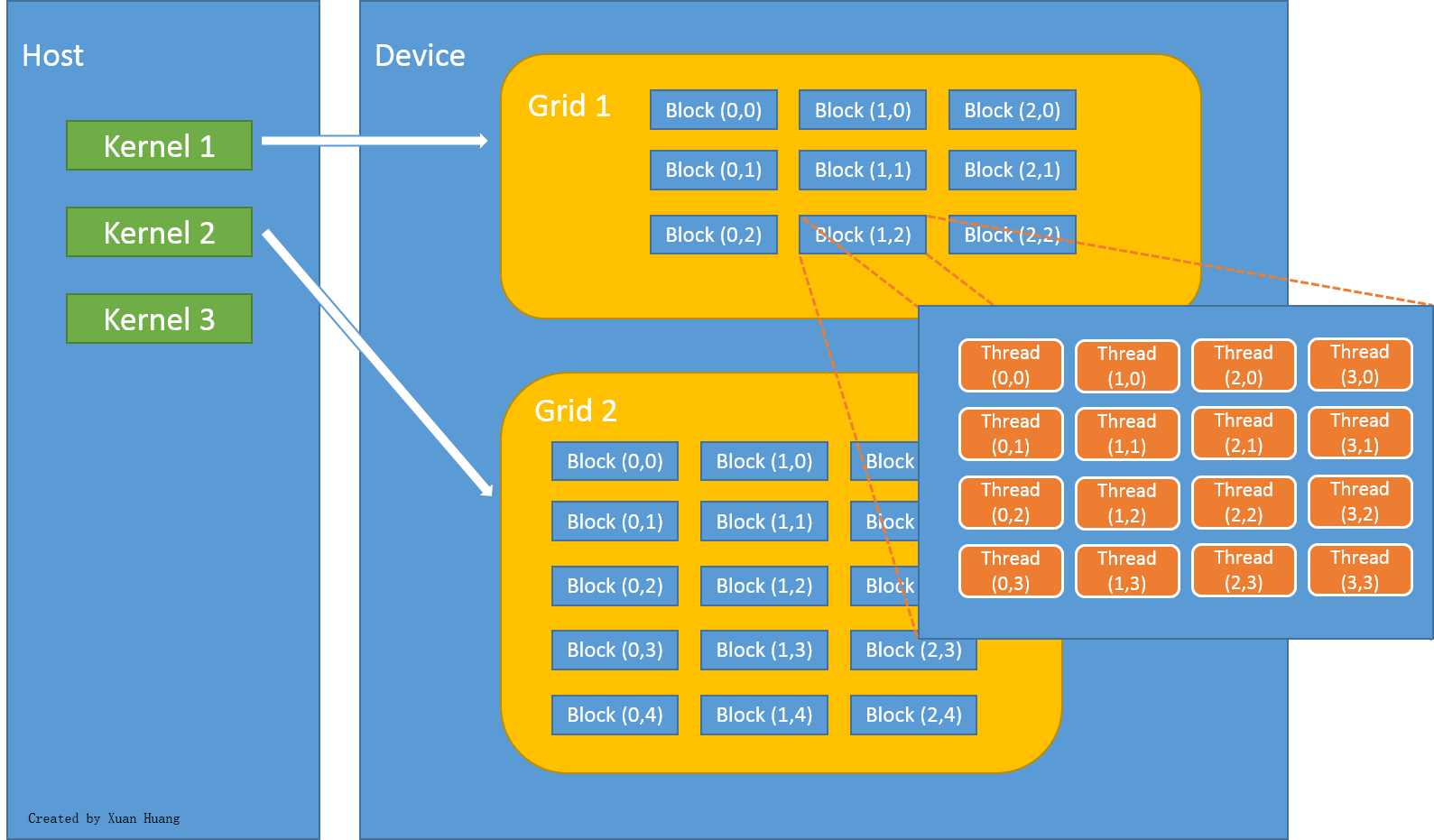
在 CUDA 架构下,一个程序被划分为两个部分:Host 端和 Device 端。Host 端是指运行在 CPU 的部分,而 Device 端则是在 GPU 上运行的部分,如下图所示。
在程序执行过程中,通常 Host 端程序会将数据在主内存中准备好并复制到显存,再由 GPU 执行 Device 端程序,完成后由 Host 端程序将结果从显存拷贝至主内存。由于 CPU 存取显存时只能通过 PCI Express 接口,因此速度较慢(PCI Express x16 的理论带宽是双向各 4 GB/s),因此不能太频繁的执行这类操作,以免降低效率。
在 CUDA 架构下,GPU 执行时的最小单元是 Thread,数个 Thread 可以组成一个 Block ,一个 Block 中的 Thread 能够存取同一块共享的内存,而且可以快速进行同步操作。每一个 Block 所能包含的 Thread 数目是有限的,但是执行相同程序的 Block 可以组成 Grid。不同 Block 中的 Thread 无法存取同一个共享内存,因此无法进行通信和同步。
由于 GPU 具备大量适用于并行计算的特性,因此 GPU 处理问题的方式和 CPU 是不同的,主要体现在以下两点。
- 内存存取 latency 的问题:CPU 通常使用 Cache 开减少存取主内存的次数,以避免内存 latency 影响到执行效率。GPU 通常没有 Cache(或很小),其利用并行化的方式来隐藏内存的 latency(当一个 Thread 需要等待内存读取时,开始执行另一个 Thread)。
- 分支指令的问题:CPU 通常利用分支预测等方式来减少分支指令造成的 pipeline bubble。GPU 则多半使用类似处理内存 latency 的方式。不过,通常 GPU 处理分支的效率会比较差。
Section 1: Sum of Squares
目标:对于给定数组,利用 CUDA 编程实现对该数组所有元素的平方进行求和,并计算每次求和所消耗的时间及显存带宽。
我们首先实现在 GPU 上的串行求和程序,然后将串行程序并行化,并从两个维度对并行程序进行优化。
Step 1: CUDA初始化
首先实验需要使用 CUDA 的 RunTime API,所以需要引入头文件 cuda_runtime.h。
// CUDA Runtime API
#include <cuda_runtime.h>
编写程序对当前环境进行检测,如果存在支持 CUDA 的设备,需要设置相应的设备。如下所示。
/* CUDA初始化 */
bool initCUDA() {
int count, i;
// 取得支持CUDA的装置的数目
cudaGetDeviceCount(&count);
if (0 == count) {
fprintf(stderr, "There is no device.\n");
return false;
}
for (i = 0; i < count; i++) {
cudaDeviceProp prop;
if (cudaGetDeviceProperties(&prop, i) == cudaSuccess) {
if (prop.major >= 1) {
break;
}
}
}
if (i == count) {
fprintf(stderr, "There is no device.\n");
return false;
}
cudaSetDevice(i);
return true;
}
这段程序首先调用cudaGetDeviceCount函数获取支持 CUDA 的设备的数量,如果不存在支持 CUDA 的设备 ,则会传入 1( Device 0),Device 0 只是一个仿真设备,CUDA 的很多功能都不支持,因此如果要真正的确定是否存在支持 CUDA 的设备,需要对每个设备调用cudaGetDeviceProperties函数来获取具体的参数。
Step 2: CUDA核函数
在介绍核函数前,通过一段程序创建待求和的数组,如下所示。
/* 产生0-9之间的随机数 */
void generateNumbers(int *numbers, int size) {
int i;
for (i = 0; i < size; i++) {
numbers[i] = rand() % 10;
}
}
如果要进行求和计算,需要将生成的数组从主内存拷贝至显存。因此,我们需要在显存开辟一块合适的空间,然后将数组拷贝至显存空间,相关代码如下。
int *gpudata, *result;
generateNumbers(data, DATA_SIZE);
// 在显存上分配空间
// 思考:为什么cudaMalloc函数原型的第一个参数类型为 (void **)?
// 原因:gpudata指向某块内存区域的首地址,cudaMalloc在显存中分配一块内存,然后将该内存区域的首地址
// 赋值给gpudata,因此cudaMalloc修改的是gpudata本身的值,而不是gpudata指向的内存区域的值。
cudaMalloc((void**)&gpudata, sizeof(int) * DATA_SIZE);
cudaMalloc((void**)&result, sizeof(int));
// 将数据从内存复制到显存
cudaMemcpy(gpudata, data, sizeof(int) * DATA_SIZE, cudaMemcpyHostToDevice);
在完成主内存和显存的数据拷贝后,开始着手编写核函数实现在 GPU 上的求和计算,核函数在编写时需要在函数返回值(void)加添加__global__,同时,核函数不允许有返回值。目前我们仅实现串行求和,其核函数如下所示。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *result) {
int sum, i;
sum = 0;
for (i = 0; i < DATA_SIZE; i++) {
sum += numbers[i] * numbers[i];
}
*result = sum;
}
Step 3: 执行核函数
在 CUDA 中,使用如下规则执行核函数。
函数名称<<<Block Num, Thread Num, Shared Memory Size>>>(参数...);
因为目前我们仅需要实现串行计算,因此设置Block Num = 1,Thread Num = 1,Shared Memory Size = 0,相关程序如下所示。同时,在执行核函数后不要忘记释放程序分配的显存。
sumOfSquares << < 1, 1, 0 >> > (gpudata, result);
// 把计算结果从显存复制到内存
cudaMemcpy(&sum, result, sizeof(int), cudaMemcpyDeviceToHost);
cudaFree(gpudata);
cudaFree(result);
Step 1,Step 2 和 Step 3 的完整程序sum_squares_1.cu见 GitHub 。
Step 4: 评估程序表现
在介绍 CUDA 架构时提到,GPU 通常没有 Cache(或很小),因此我们在编写程序时需要避免内存 latency 影响到执行效率。本实验通过核函数的运行时间来计算程序所使用的显存带宽,以此作为评估程序性能表现的标准之一。
对sum_squares_1.cu进行部分改动:利用clock函数获取当前时间,时间差值即为核函数的运行时间,相关代码如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *result, clock_t *time) {
int sum, i;
clock_t start, end;
// 获取起始时间
start = clock();
sum = 0;
for (i = 0; i < DATA_SIZE; i++) {
sum += numbers[i] * numbers[i];
}
*result = sum;
// 获取结束时间
end = clock();
*time = end - start;
}
由于核函数不能有返回值,因此需要在显存开辟一块空间来保存运行时间,然后将该运行时间值拷贝至内存。注意,该时间值的单位是时钟周期,我们需要将消耗的时钟周期数除以 GPU 自身的频率得到以秒为单位的时间值。
对于显存带宽的计算,整个过程程序传输的数据量大小为 40 MB,将其除以时间得到程序运行过程中占用的显存带宽。程序运行结果如下图所示,此时显存访问带宽约为 46 MB/s。

Step 4 的完整程序 sum_squares_2.cu 见 GitHub。
Step 5: 串行程序并行化
在 CUDA 中,数据是从主内存复制到显存的 Global Memory,而Global Memory 是没有 Cache 的 ,因此存取 Global Memory 所需要的时间是非常长的(通常有数百个时钟周期)。由于之前的程序只有一个线程,当线程读取 Global Memory 时,线程会等待至实际数据读取成功,才能进行下一步计算。
如果程序有多个线程,当其中一个线程在等待读取 Global Memory 时,GPU 可以立即切换至另一个线程。因此,通过增加线程的数量来提高显存的带宽是有效的策略。
首先在程序中定义线程的数量,如下所示。
// 线程数
#define THREAD_NUM 256
程序将数组划分为 THREAD_NUM段,每个线程负责计算其中一段。最后,CPU 负责将各个线程计算得到的子结果进行累加。相关代码如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *sub_sum, clock_t *time) {
int i;
// 获取当前线程Id(从0开始)
const int thread_id = threadIdx.x;
// 每个线程累加元素的个数
const int size = DATA_SIZE / THREAD_NUM;
sub_sum[thread_id] = 0;
for (i = thread_id * size; i < (thread_id + 1) * size; i++) {
sub_sum[thread_id] += numbers[i] * numbers[i];
}
}
程序运行结果如下图所示,当实现初步并行化后,显存的使用带宽上升至 1.2 GB/s。

Step 5 的完整程序sum_squares_3.cu见 GitHub。
Step 6: 改进显存存取模式
显卡内存一般都是 DRAM,因此最有效的显存存取方式为连续存取。对于cuda_sample_3,虽然每个线程操作的都是一块连续的内存,但是考虑当一个线程等待 Global Memory 的数据时,GPU 切换至另一个线程,而另一个线程会从显存的其它位置存取数据,下图描述了上述过程。

综上分析,虽然在同一个线程中是在一块连续的显存空间读取数据,但是在实际执行时并不是连续读取的,而是跳跃式的存取模式。因此,我们需要将显存的存取模式改进为连续存取模式,如下图所示。

修改核函数,改进显存的存取模式,相关程序如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *sub_sum, clock_t *time) {
int i;
const int thread_id = threadIdx.x;
sub_sum[thread_id] = 0;
// 线程0获取第0个元素,线程1获取第1个元素,以此类推...
for (i = thread_id; i < DATA_SIZE; i += THREAD_NUM) {
sub_sum[thread_id] += numbers[i] * numbers[i];
}
}
程序运行结果如下图所示,当我们优化了显存的存取模式后,显存的使用带宽上升至 1.9 GB/s。

Step 6 的完整程序sum_squares_4.cu见 GitHub。
Step 7: 进一步并行
在介绍 CUDA 架构时提到,CUDA 除了提供了 Thread,还提供了 Block 及 Grid等重要的机制。每个 Block 的数量是有限的,但是可以通过增加 Block 的数量来成倍的增加线程的数量。需要注意的是,不同 Block 内的线程相互不能同步和通信,不过在我们的程序中线程之间并不需要进行同步或通信。因此,Step 7 将会使用多个 Block 来进一步并行化程序。相关代码如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *sub_sum, clock_t *time) {
int i;
// 获取当前线程所属的Block号(从0开始)
const int block_id = blockIdx.x;
const int thread_id = threadIdx.x;
sub_sum[block_id * THREAD_NUM + thread_id] = 0;
// Block0-线程0获取第0个元素,Block0-线程1获取第1个元素...Block1-线程0获取第THREAD_NUM个元素,以此类推...
for (i = block_id * THREAD_NUM + thread_id; i < DATA_SIZE; i += BLOCK_NUM * THREAD_NUM) {
sub_sum[block_id * THREAD_NUM + thread_id] += numbers[i] * numbers[i];
}
}
程序运行结果如下图所示,当我们通过使用多 Block 来增加线程数目时,显存的使用带宽约为 11 GB/s。

Step 7 的完整程序sum_squares_5.cu见 GitHub。
Step 8: 共享内存和线程同步
在 Step 7 中,CPU 需要进行 BLOCK_NUM * THREAD_NUM 个元素的累加,如果可以让 GPU 执行一部分的累加,理应能够进一步提高程序的并行度。因为在一个 Block 内,线程是可以共享内存的,因此可以在 GPU 上实现一个 Block 内的线程结果累加,CPU 仅需要完成各个 Block 的计算结果的累加。
需要注意:需要等待一个 Block 内的所有线程都完成计算才进行各个线程的计算结果的类型。因此,程序需要进行线程的同步,在 CUDA 中,通过__syncthreads函数进行线程的同步,相关代码如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *sub_sum, clock_t *time) {
int i;
// 声明共享内存区域,用于存储每个Block中线程计算结果的累加和
extern __shared__ int shared[];
const int block_id = blockIdx.x;
const int thread_id = threadIdx.x;
shared[thread_id] = 0;
for (i = block_id * THREAD_NUM + thread_id; i < DATA_SIZE; i += BLOCK_NUM * THREAD_NUM) {
shared[thread_id] += numbers[i] * numbers[i];
}
// 线程同步,所有线程需要执行到此处方可继续向下执行
__syncthreads();
// 线程0负责计算所有线程的计算结果累加和
if (0 == thread_id) {
for (i = 1; i < THREAD_NUM; i++) {
shared[0] += shared[i];
}
sub_sum[block_id] = shared[0];
}
}
程序运行结果如下图所示,显存使用带宽有所提升,但提升效果并不明显。

Step 8 的完整程序sum_squares_6.cu见 GitHub。
Step 9: 树状加法
在 Step 8 中,一个 Block 中所有线程的结果的累加是通过一个线程(Thread 0)实现的,如果能够把每个 Block 内的加法并行化,那么程序的并行度应该能够进一步提高。我们利用树状加法将加法并行,树状加法计算过程如下图所示。
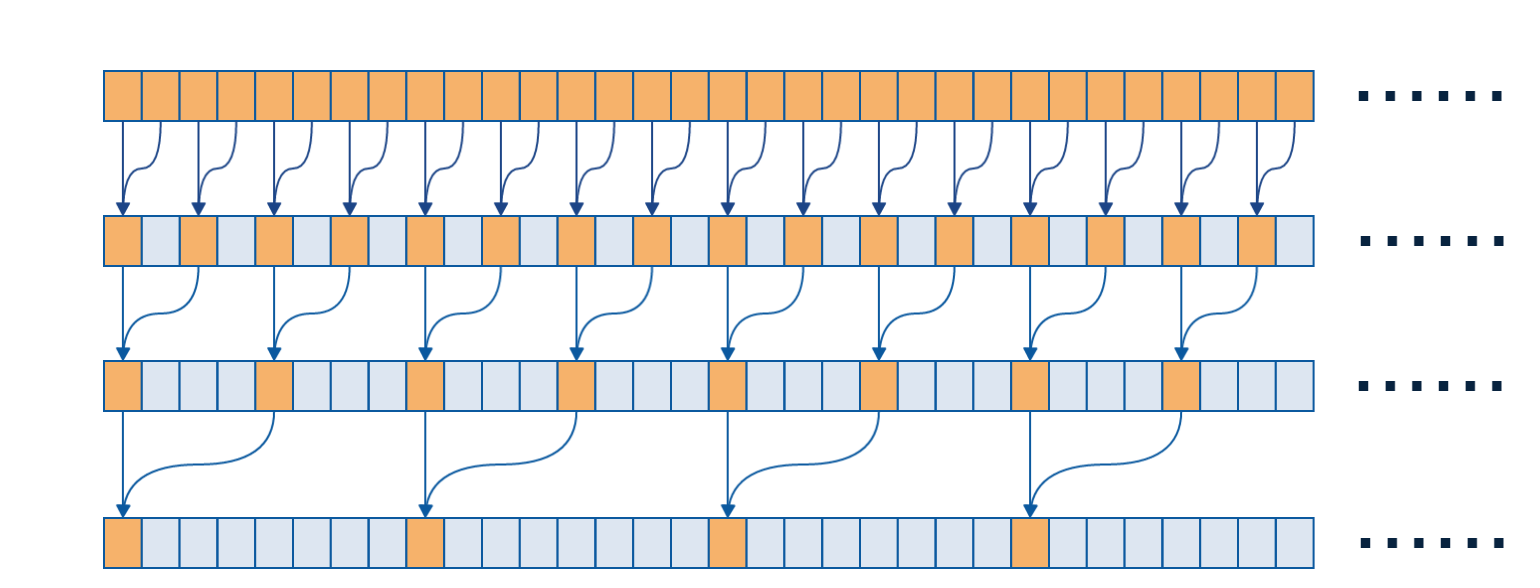
上图一个格子代表一个线程的计算结果,当进行第一轮迭代时,步长等于 1,Thread 0 和 Thread 1 相加,Thread 2 和 Thread 3 相加,依次类推…当进行第二轮迭代时,步长等于 1 + 1 = 2,Thread 0 和 Thread 2 相加,Thread 4 和 Thread 6 相加,依次类推…当进行第三轮迭代时,步长等于 2 + 2 = 4, Thread 0 和 Thread 4 相加,Thread 8 和 Thread 12 相加…依次类推。相关代码如下。
/* 计算平方和(__global__函数运行于GPU)*/
__global__ static void sumOfSquares(int *numbers, int *sub_sum, clock_t *time) {
int i;
extern __shared__ int shared[];
const int block_id = blockIdx.x;
const int thread_id = threadIdx.x;
// 定义步长和计算掩码
int offset, mask;
shared[thread_id] = 0;
for (i = block_id * THREAD_NUM + thread_id; i < DATA_SIZE; i += BLOCK_NUM * THREAD_NUM) {
shared[thread_id] += numbers[i] * numbers[i];
}
__syncthreads();
/* 并行加法代码段 */
offset = 1;
mask = 1;
while (offset < THREAD_NUM) {
// 注意 & 的优先级小于 ==
if ((thread_id & mask) == 0 && thread_id + offset < THREAD_NUM) {
shared[thread_id] += shared[thread_id + offset];
}
offset += offset;
mask += offset;
// 每迭代一轮需要所有线程进行一次同步
__syncthreads();
}
sub_sum[block_id] = shared[0];
}
程序运行结果如下图所示。

Step 9 的完整程序sum_squares_7.cu见 GitHub。
Section 2: Matrix Multiplication
目标:利用 CUDA 编写矩阵乘法并行程序,为了简化程序编写,假设待相乘的两个矩阵均为方块矩阵。
在 CUDA 上实现矩阵乘法有多种方法,我自己实现了一个版本,供参考。